
Priceless
[Xycar] OpenCV와 Xycar 카메라 활용 본문
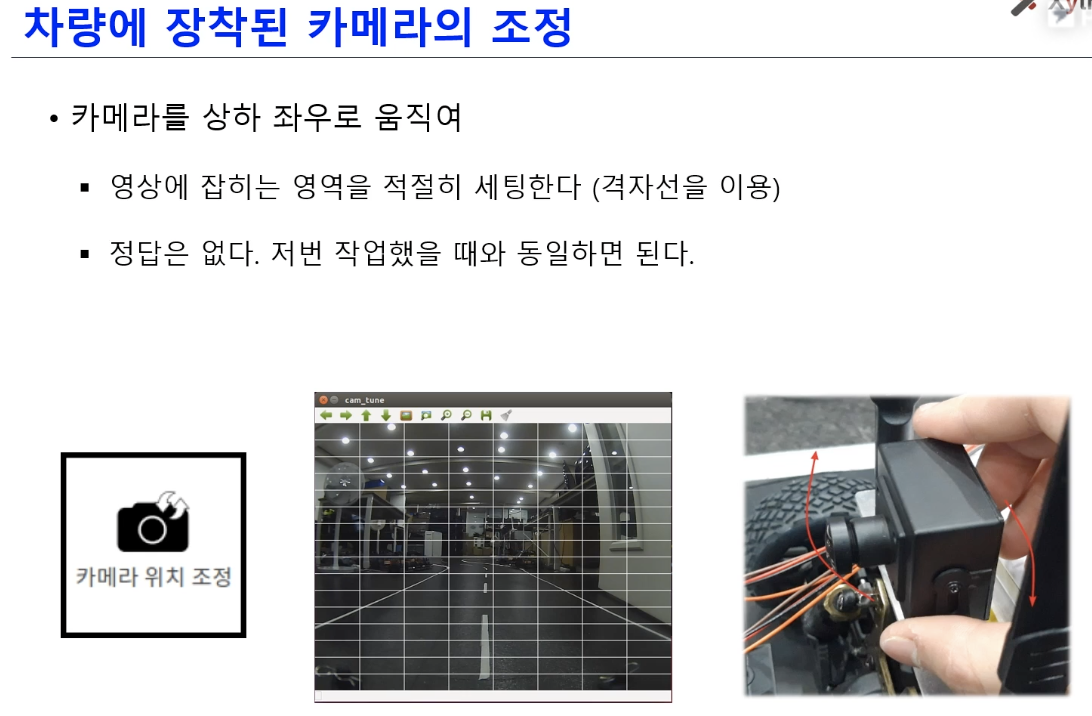
자이카에 장착된 카메라 장치
카메라

카메라 활용 사례
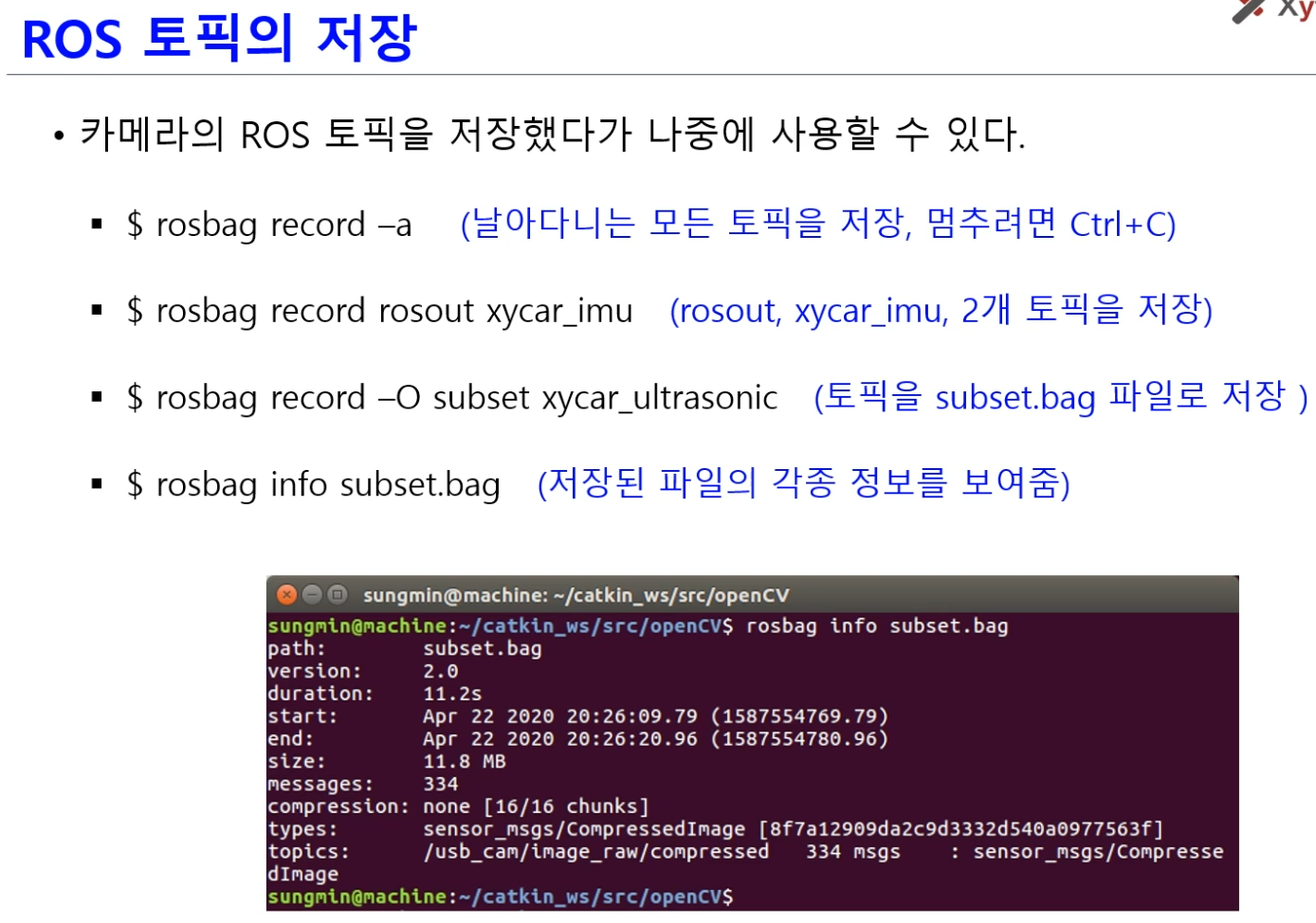
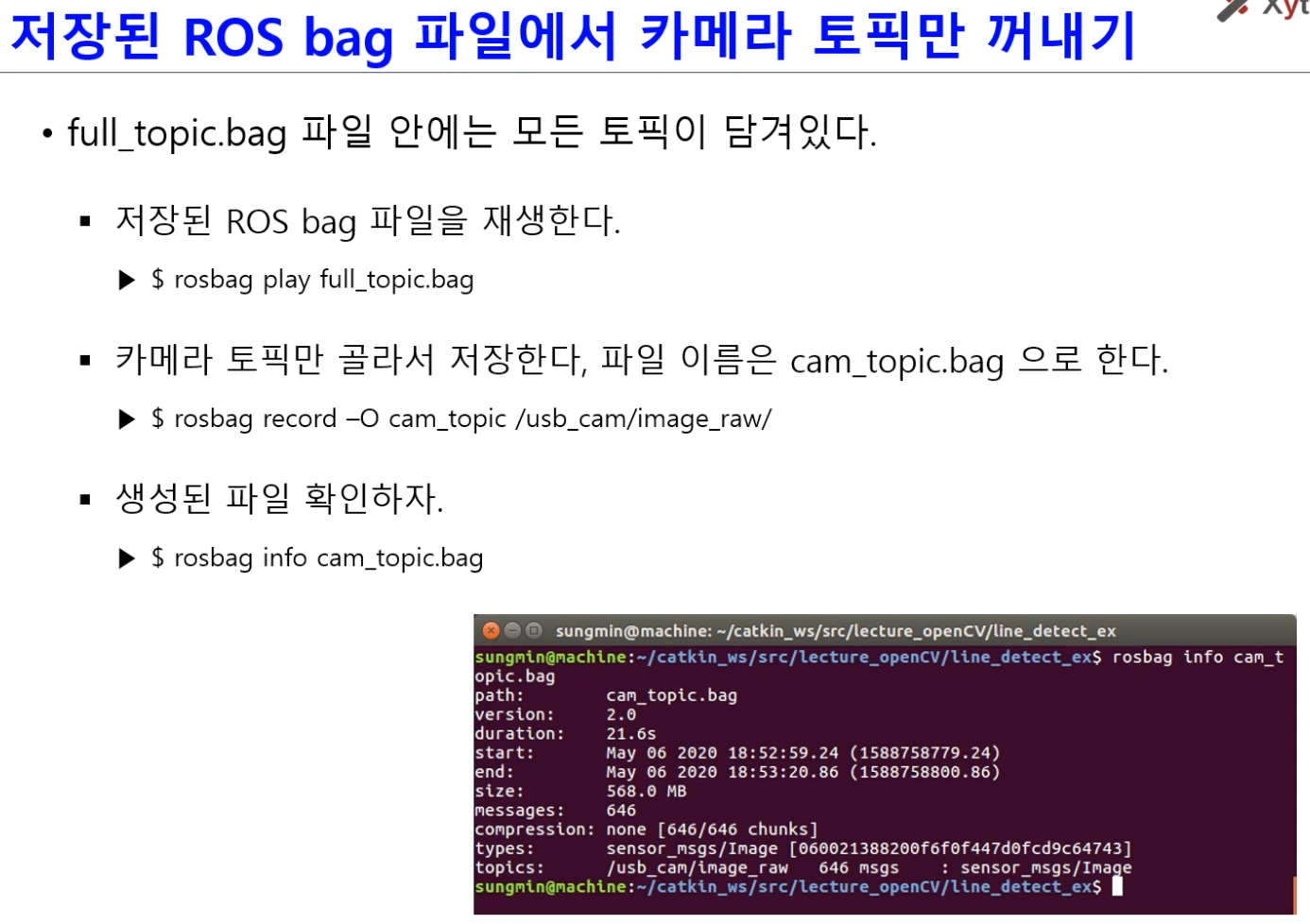
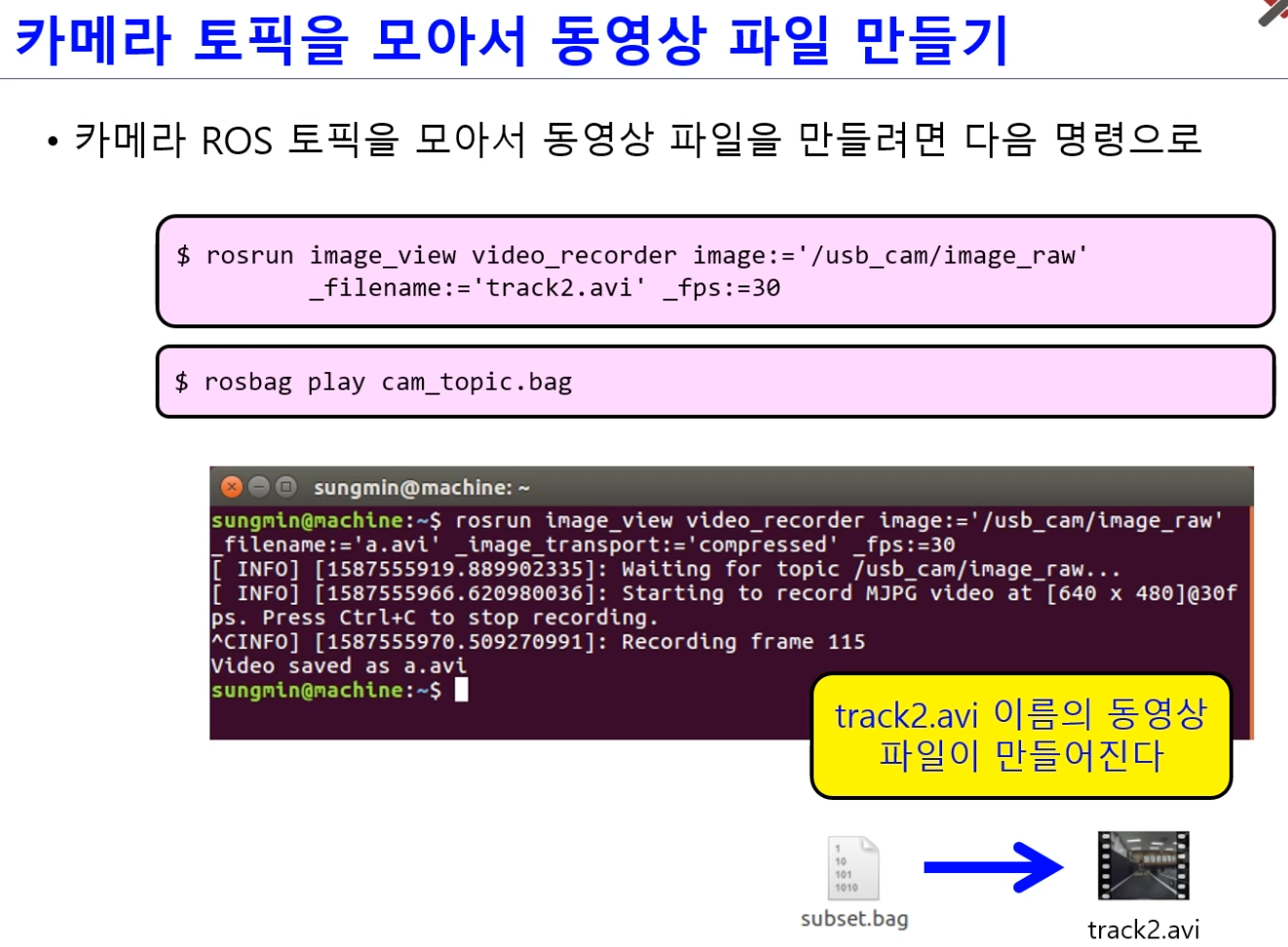
카메라 관련 ROS 패키지

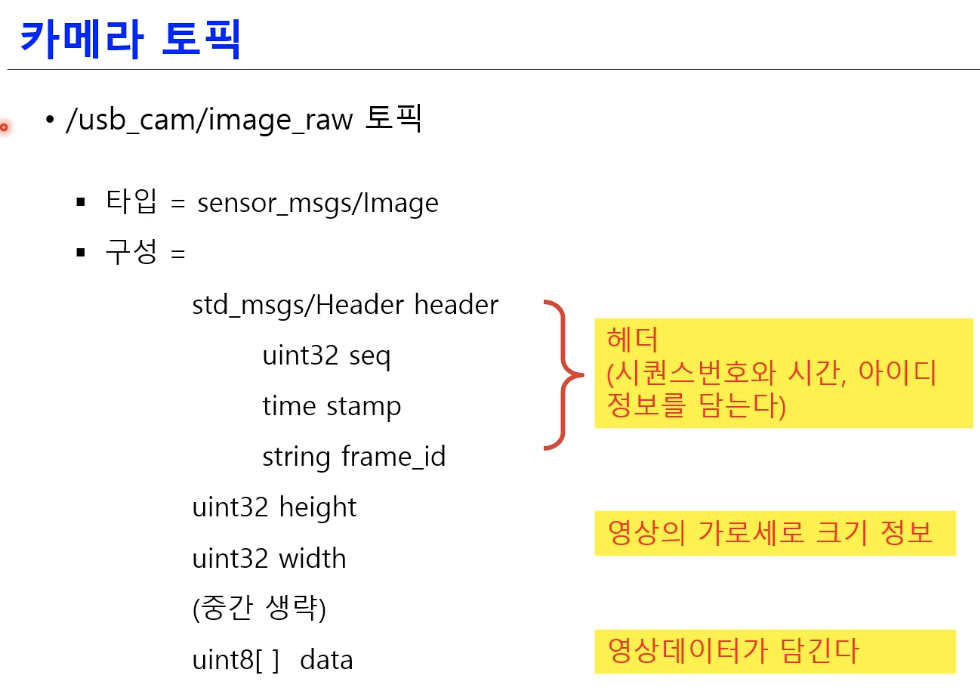
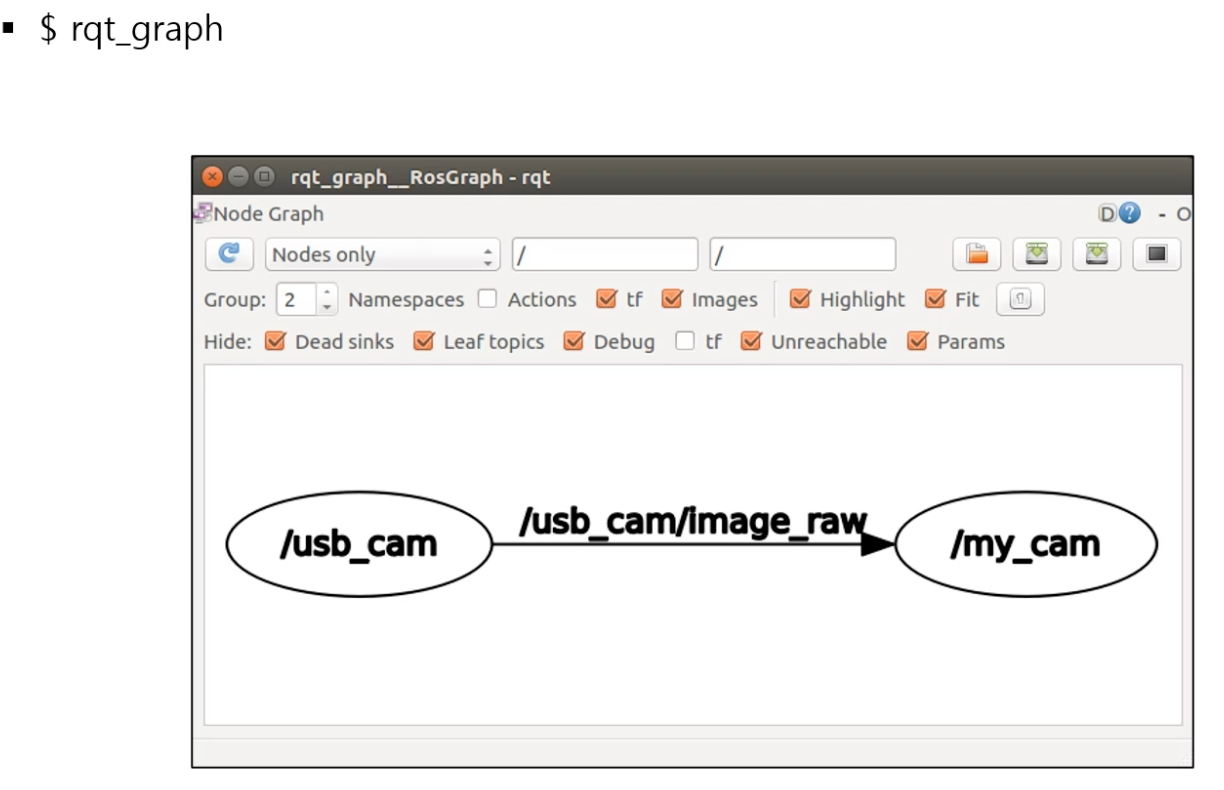
카메라로부터 영상 데이터 토픽을 전달

usb_cam 패키지에서 전달하는 토픽
원본 이미지와 압축된 이미지 두 가지 토픽을 사용할 수 있다
압축된 이미지 토픽을 받은 노드는 이후 압축을 해제해야 한다
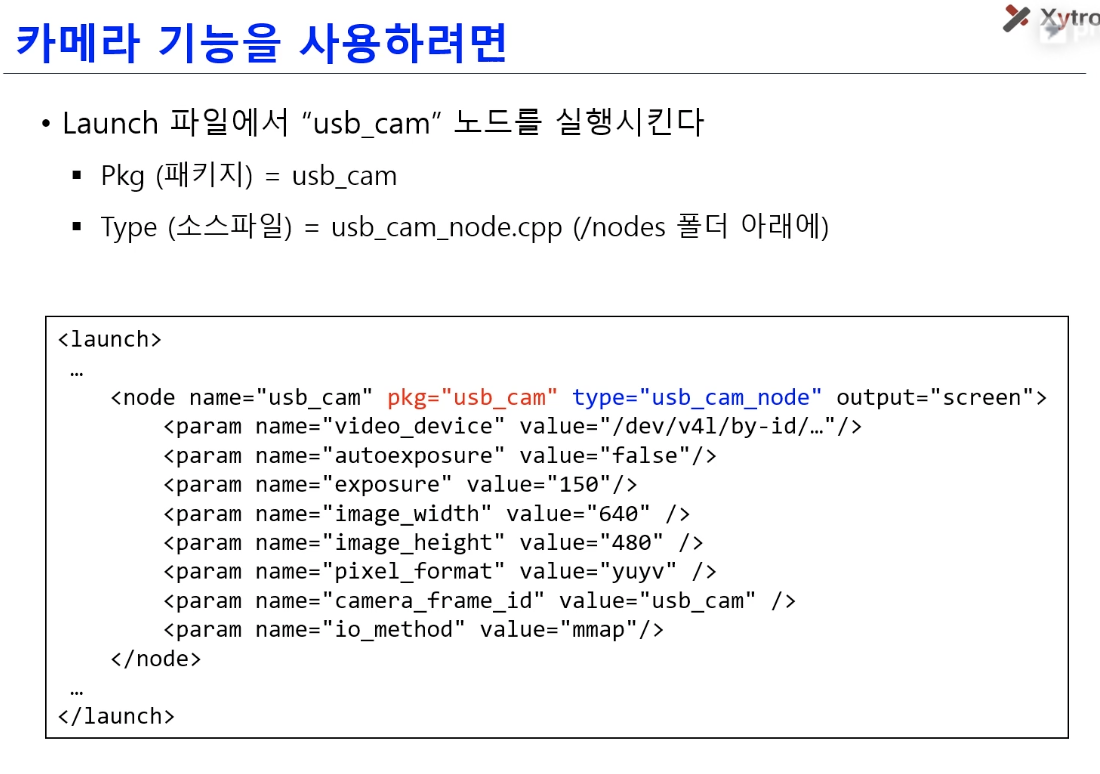
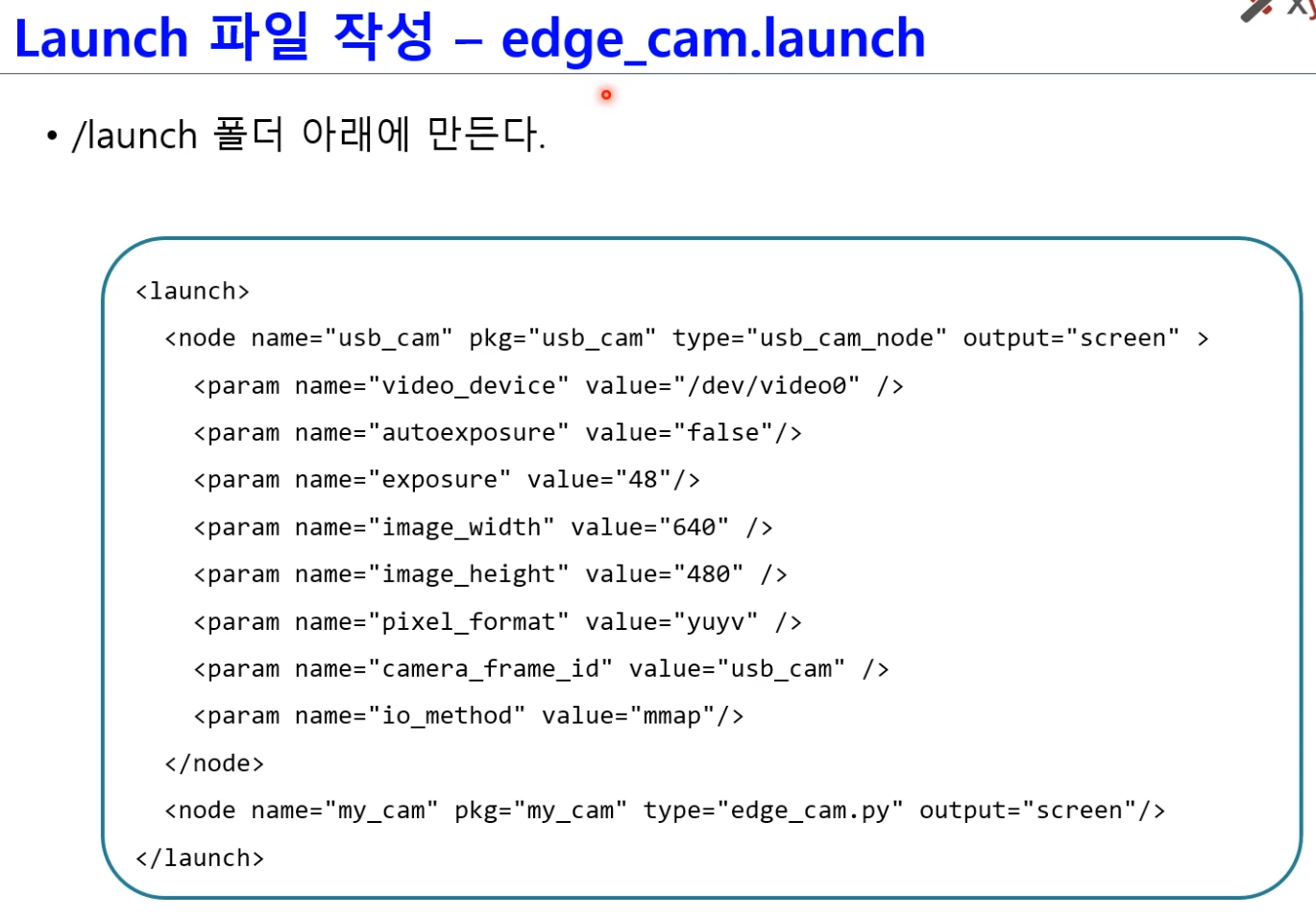
usb_cam 패키지 내의 usb_cam_node 타입을 사용
video_device 파라미터는 장치 경로를 입력한다
경로가 바뀌는 경우 맞춰줘야 한다
갑자기 카메라가 안되면 저 부분을 수정해볼 것
다른 것은 크게 수정할 것은 없고 노출 값은 조절해야 할 수도 있다
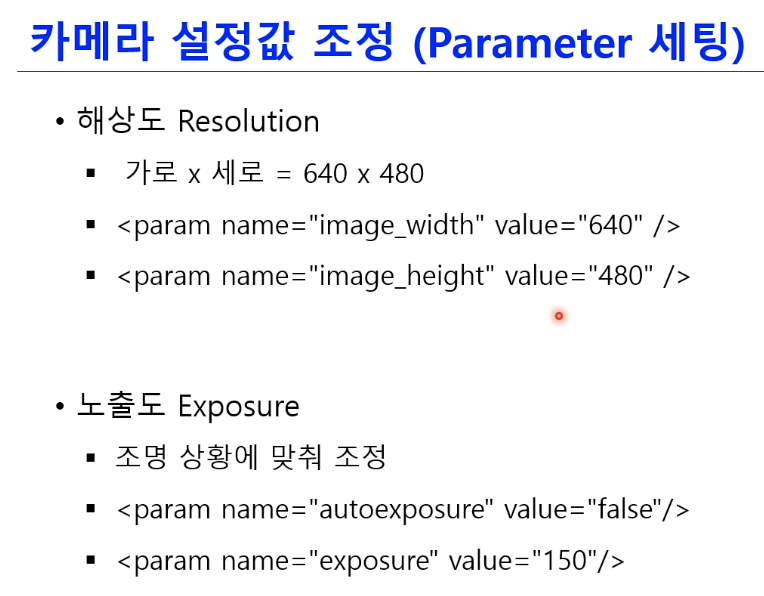
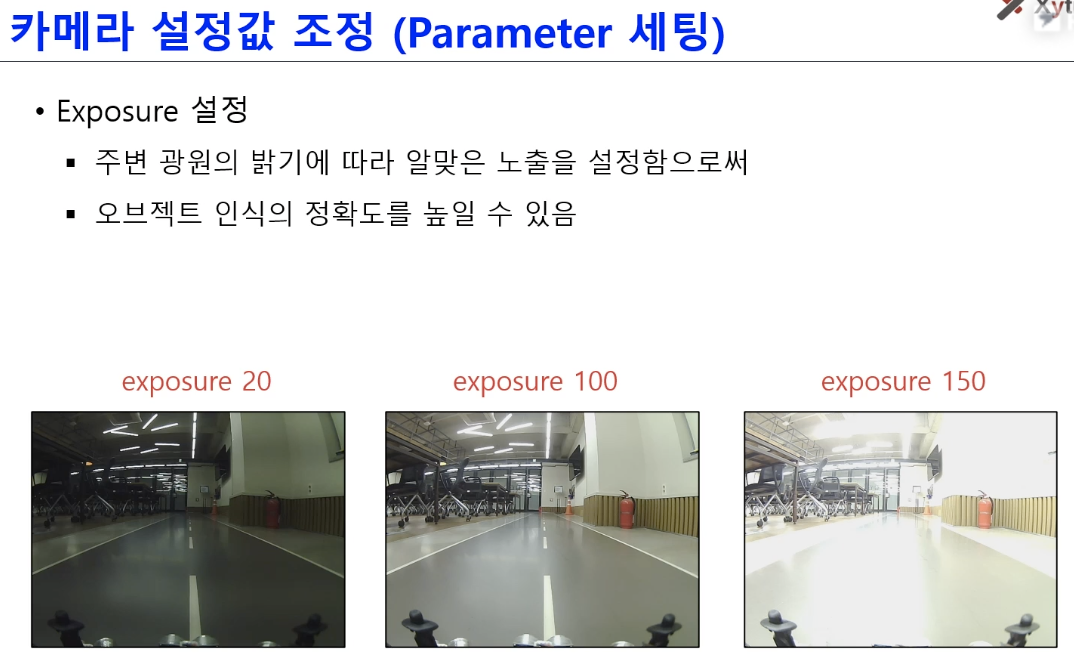
opencv 는 20이 나을 수도 있다
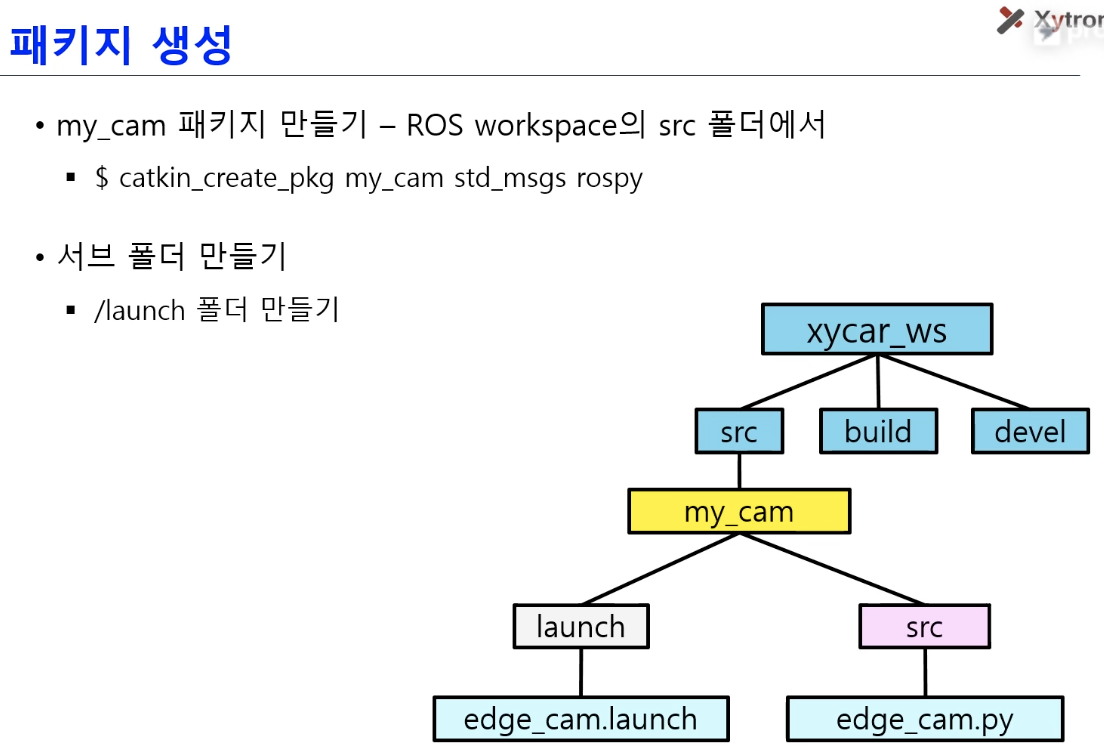
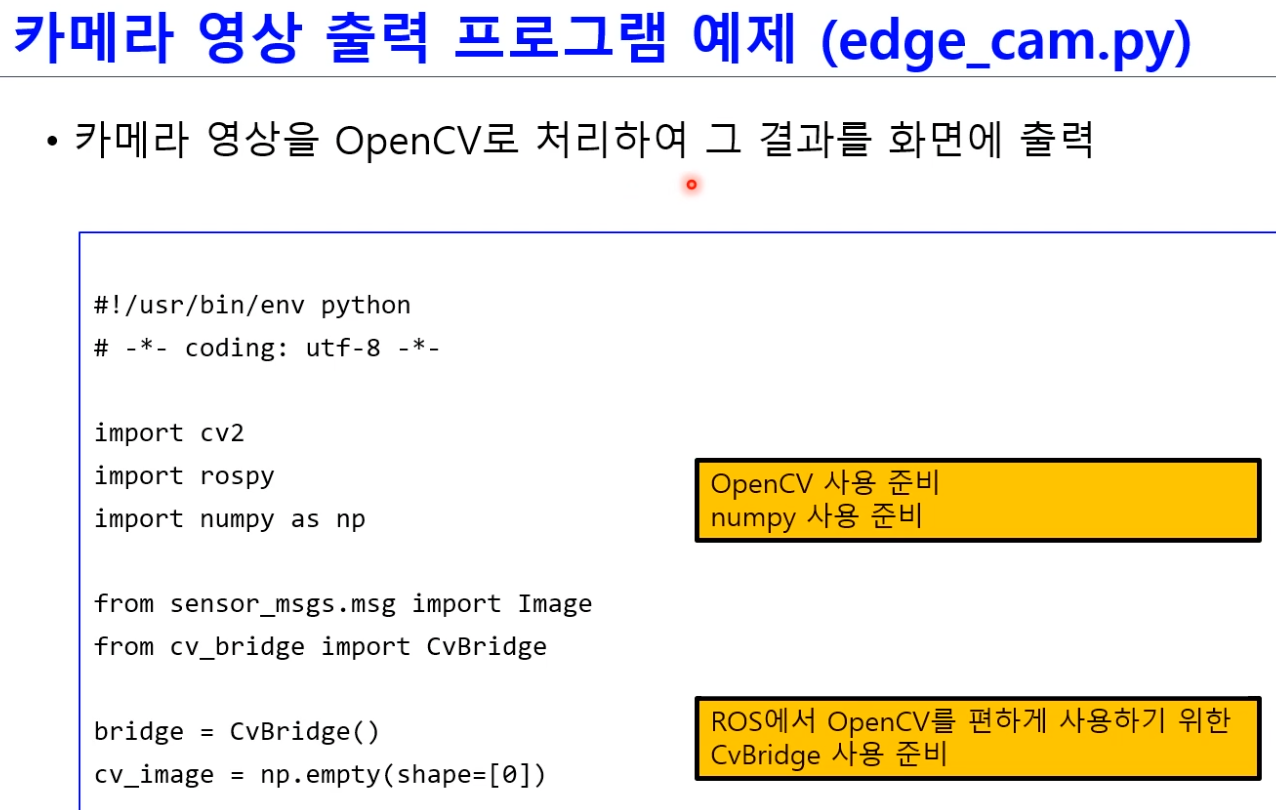
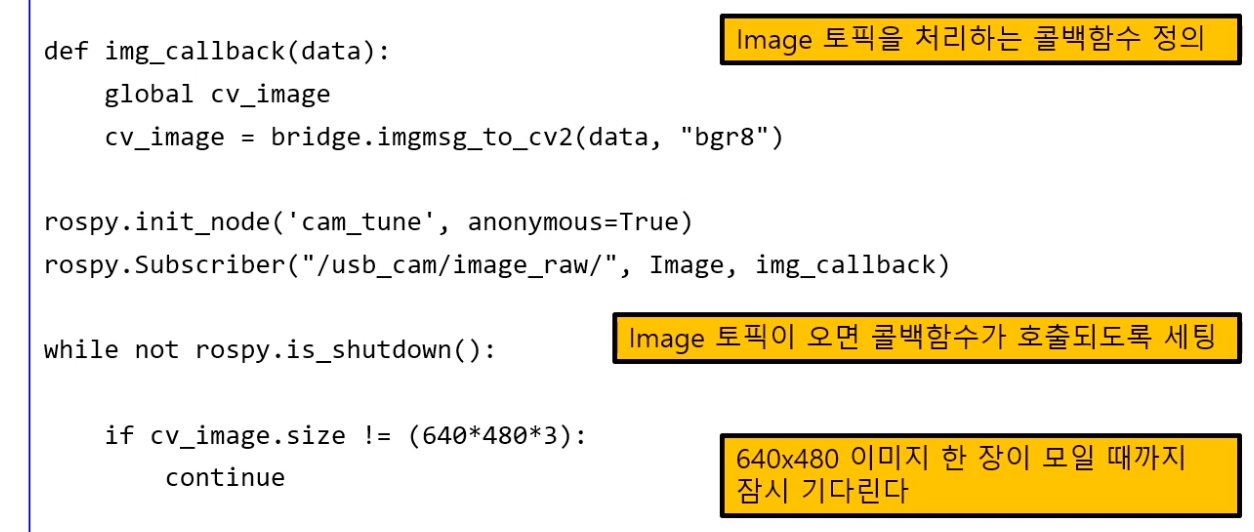
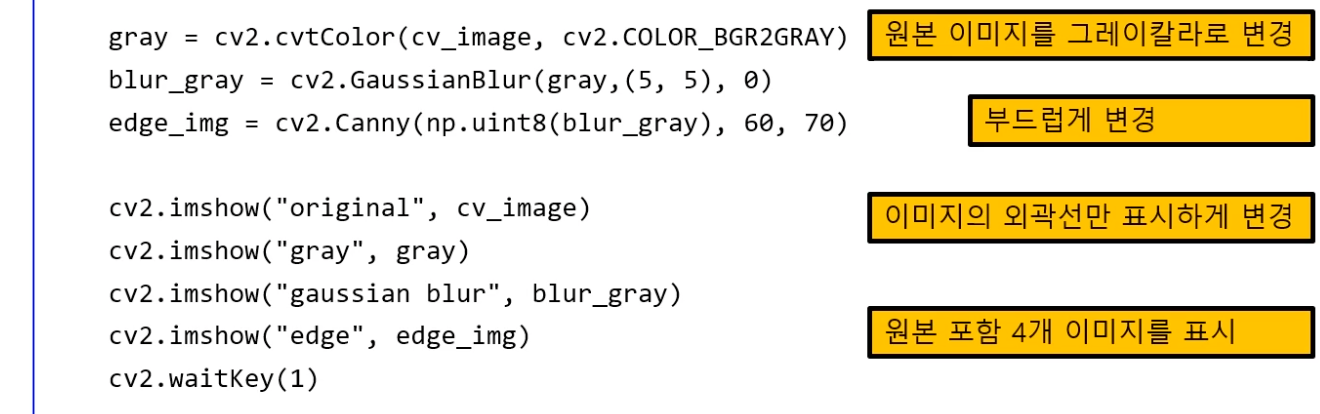
카메라 활용 ROS 프로그래밍



'Autonomous Vehicles > Xycar' 카테고리의 다른 글
| [Xycar] 필터 기반 조향각 제어 (0) | 2023.11.09 |
|---|---|
| [Xycar] 슬라이딩 윈도우 기반 차선 인식 (0) | 2023.11.09 |
| [Xycar] 허프 변환 기반 차선 인식 (0) | 2023.11.09 |
| [Xycar] RVIZ 차선 인식 주행 (0) | 2023.11.08 |
| [Xycar] 영상 처리 명도차 기반 차선 인식 (0) | 2023.11.08 |
'Autonomous Vehicles/Xycar' Related Articles
more



