
목록분류 전체보기 (159)
Priceless
 [Paper] DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments 리뷰
[Paper] DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments 리뷰
참고[1809.08379] DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments (arxiv.org) DS-SLAM 논문을 번역했습니다.최근 진행한 프로젝트에서 참고하다가 현재는 참고하지 않아서 기록용으로 올립니다.아직 미완성 번역이지만 추후에 다시 읽을 때 수정하겠습니다.오번역, 오타 지적해주시면 감사하겠습니다. DS-SLAM > ORB-SLAM2 (+ SegNet) > Visual SLAM > SLAM 0. AbstractSLAM은 지능형 이동 로봇의 기본적 역량이다. 지난 몇 십 년 간, 많은 SLAM 시스템이 개발되었고 특정 환경 내에서 좋은 성능이 나타났다. 그러나 일부 문제가 남아있는데, 동적 환경에서 움직이는 객체를 어떻게 태클하는지,..
 [SLAM] Livox Mid-360을 활용한 FAST-LIO 수행
[SLAM] Livox Mid-360을 활용한 FAST-LIO 수행
환경HWPC: Lattepanda SigmaLidar: Livox Mid-360 SWOS: Ubuntu 20.04ROS Noetic ~/catkin_ws/src 디렉토리에서 진행한다 FAST-LIO를 실행하기 위한 라이브러리 요구사항은 아래와 같다. Livox ROS Driver 설치참고https://github.com/Livox-SDK/livox_ros_driver2 livox lidar를 ROS에서 사용하기 위해 SDK를 설치한다cd ~/catkin_ws/srcgit clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2 ROS Noetic을 사용하므로ROS1에 맞게 빌드한다.cd ~/catkin_..
 [Linux] Ubuntu 설치 과정과 설치 이후 화면이 정상적으로 뜨지 않는 오류
[Linux] Ubuntu 설치 과정과 설치 이후 화면이 정상적으로 뜨지 않는 오류
우선 결론 글에 적혀있는 설치 환경과 유사한 환경을 구성하려고 한다면 적지 않은 확률로 내장그래픽과 외장그래픽의 충돌로 인해 화면이 출력되지 않는 것이다. 우선 그래픽 드라이버를 설치하기 전에 인텔의 내장그래픽을 비활성화해야 한다. 이후 그래픽 카드 드라이버를 설치해야 한다. 그래픽카드가 너무 최신 제품이거나 유명하지 않다면 우분투에서 자동으로 인식하지 않는다. 직접 인식시켜 준 후 그에 맞는 그래픽카드 드라이버를 설치해서 해결한다. 이 문제의 원인을 찾고 해결하기까지 5일이 걸렸다.. 그러면서 촬영한 사진이 거의 없으니 글로 읽어주시길 바란다. 동기 데스크탑을 새로 산 이후 우분투를 설치하려 했다. 설치 과정에서 모든 경우의 수를 써도 결국에는 화면이 아예 나타나지 않거나 정상적으로 나타나지 않는 문제..
 [ML]Image Classification과 Pytorch 실습
[ML]Image Classification과 Pytorch 실습
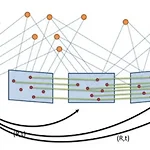
Image Classification정의이미지를 입력 받았을 때이미지의 클래스를 예측하는 모델Cat(0.95), Dog(0.05) 와 같이 확률로 나타나며그 중 확률이 가장 높은 클래스가 해당한다 CNN(Convolutional Neural Network)Image classification 중 가장 많이 쓰이는 딥러닝 모델 중 하나이미지 처리에 특화되어 있다 Convolution이라는 패치를 통해weight를 갱신하고 연산하며, pooling, fully connected layer 등의 연산 방법을 사용할 수 있다 History of Image Classification대표적인 CNN의 역사 다양한 Image classification을 위한 DatasetsImageNet, CIFAR-10, C..
 [Docker]docker compose
[Docker]docker compose
Docker Compose docker-compose docker compose는 멀티 컨테이너 환경에서 강점이 있다 하나의 컨테이너를 띄울 때도 사용할 수 있으며 configuration 파일을 만들어서 사용하기 때문에 복잡한 명령어를 반복하여 사용하지 않아도 된다 설정 파일은 yaml 파일로 만들어져 있다 기본 설정 파일 이름은 docker-compose.yml 이다 파일 이름을 변경하기 위해서는 -f 옵션을 추가한다 docker compose를 이용하여 서비스를 올릴 때 자동으로 설정 파일을 읽고 build, rebuild, create, start 등을 수행한다 사용법 docker-compose의 사용 방법은 아래와 같다 Install docker-compose를 설치하는 방법은 아래와 같다 do..
 [Docker]Docker CLI for execution
[Docker]Docker CLI for execution
Docker CLI (Command Line Interface) run 같은 컨테이너에서 여러 개의 프로그램 실행하기 1 실습을 진행하기 위해 존재하는 컨테이너를 모두 삭제한다 이후 ubuntu_top이라는 이름의 컨테이너를 생성한다 ancestor는 ubuntu이며, 실행할 명령어는 top이다 argument는 1초의 delay를 준다 성공하면 top 명령어의 결과가 뜨고 1초마다 돌아가는 결과가 나타난다 다른 터미널을 열어 똑같은 명령어를 실행하면 오류가 나타난다 같은 이름을 가진 컨테이너를 생성할 수 없다 두 번째 터미널에서 컨테이너의 이름을 ubuntu_top2로 변경하면 새로운 컨테이너가 생성된 후 실행된다 같은 컨테이너에서 2개의 top 이 실행되기 위해서는 다른 방법의 접근이 필요하다 ubu..
 [Docker]Docker CLI for images
[Docker]Docker CLI for images
Docker CLI (Command Line Interface) Docker daemon과 통신하여 기능 수행 daemon이 실행된 후 docker가 실행될 수 있다 daemon과 통신하기 위한 권한을 가지기 위해 docker group을 supplementary group에 포함시켜야 사용할 수 있다 username을 확인하고 user에게 docker 권한을 부여한다 이후 id 명령어를 입력하면 user가 추가되지 않았는데 id 명령어를 입력하면 시스템 상에 나타나는 것을 확인할 수 있다 id 명령어는 현재 runtime 상태를 반영한 것이며 id 은 현재 configure 설정 상태를 반영한 것이기 때문이다 새롭게 설정을 만들었다 하더라도 다음 세션부터 반영된다 세션을 재생성하기 위해 다시 로그인을 ..
 [Docker] Docker Installation in Linux
[Docker] Docker Installation in Linux
주의 단순 기록용 글이므로 최신 Docker 버전과 내용이 상이할 수 있습니다 Docker 설치 관련 명령어가 어떤 식으로 구성되어 있는지 확인하는 용도로 작성한 글로 자세한 내용은 다음 사이트를 참고바랍니다 https://docs.docker.com/engine/install/ubuntu Installation 하위 버전이 설치되어 있으면 충돌이 발생하므로 이전에 설치된 도커를 지운다 sudo가 필요한 경우 $ 가 나타나며 필요 없는 경우 # 이 나타난다 패키지 정보를 업데이트한 후 5개의 패키지를 추가한다 이후 key file을 추가한다 저장소를 추가하여 현재 PC의 아키텍처에 맞는 docker를 다운받는다 docker engine을 설치하기 전에 저장소가 추가되었기 때문에 저장소를 가져오는 명령어인..
 [Docker]chroot Container
[Docker]chroot Container
chroot chroot change root directory root directory .을 특정 디렉토리로 변경한다 UNIX command 및 system call로 존재한다 예제 가장 상단의 '/' 디렉토리가 root directory이며 임의의 '/mnt/chroot'의 폴더를 생성하고 폴더 내에 추가적인 파일을 생성한 후 아래의 명령어를 실행하면 호스트의 root directory가 '/mnt/chroot/usr/local'로 변경된다 chroot /mnt/chroot 이를 사용할 경우 각 프로세스마다 private mount layout을 가질 수 있는 장점이 있다 특정 파일 설치, 복구, 보안 모드 등에 사용할 수 있다 보안 측면의 격리 chroot를 통해 기초적인 격리를 할 수 있다 sa..
 [VSLAM]Bundle Adjustment
[VSLAM]Bundle Adjustment
Bundle Adjustment(BA) N-view geometry There are N frames Triangulation에서 수행했던 2 view geometry가 아닌 n개의 이미지를 사용한 N view image이다 여러 개의 frame이 있고 각 프레임마다 relative motion(rotation and translation)을 가지고 있다 frame마다 correspondence를 가지고 있으며, Landmark의 3D 위치도 알고 있으며, 하나의 landmark에는 두 개 이상의 2D to 3D correspondence를 가지고 있다 로봇이 이동하면서 frame마다의 motion과 observation에서 발생하는 noise가 쌓여 나타난 uncertainty를 해결하기 위해 batc..